
[Sergii] has been learning about robot simulation and wrote up a basic simulator for a robodog platform: the Unitree A1. It only took about 800 lines of code to do so, which probably makes it a good place to start if one is headed in a similar direction.
Right now, [Sergii]’s simulator is an interactive physics model than runs in the browser. Software-wise, once the model of the robot exists the Rapier JavaScript physics engine takes care of the physics simulation. The robot’s physical layout comes from the manufacturer’s repository, so it doesn’t need to be created from scratch.
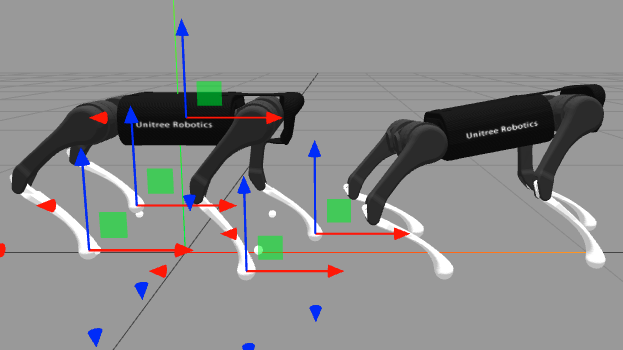
To make the tool useful, the application has two models of the robot, side by side. The one on the left is the control model, and has interactive sliders for limb positions. All movements on the control model are transmitted to the model on the right, which is the simulation model, setting the pose. The simulation model is the one that actually models the physics and gravity of all the desired motions and positions. [Sergii]’s next step is to use the simulator to design and implement a simple walking gait controller, and we look forward to how that turns out.
If Unitree sounds familiar to you, it might be because we recently covered how an unofficial SDK was able to open up some otherwise-unavailable features on the robodogs, so check that out if you want to get a little more out of what you paid for.
Browser-Based Robot Dog Simulator in ~800 Lines of Code
Source: Manila Flash Report





0 Comments